Contents
Part 1. Simple application (POSIX)
KasperskyOS Community Edition includes a set of libraries (libc, libm and libpthread) ensuring that the developed applications are partially compatible with the POSIX family of standards.
This part of the Guide illustrates the following:
- Printing a string to the screen by using
fprintf() - Using VFS component for working with a network and file systems
- Creating the
Einitinitializing entity - POSIX support limitations
To simplify the descriptions, the example in this part of the Guide is built without the ksm.module. For this reason, when example is started, a notification WARNING! Booting an insecure kernel! is displayed. The third part of the Guide examines a solution security policy, use of security policies, and building ksm.module.
hello example
In the software development world, learning a new technology traditionally starts with using that technology to greet the world. We will keep that tradition with KasperskyOS, so we begin with an example that displays Hello world! on the screen.
KasperskyOS lets you develop solutions in the C and C++ languages.
The hello.c code looks familiar and simple to a developer that uses C, and is fully compatible with POSIX:
hello.c
int main(int argc, const char *argv[])
{
fprintf(stderr,"Hello world!\n");
return EXIT_SUCCESS;
}
To run the Hello file in KasperskyOS, multiple additional actions are required.
Development of applications for KasperskyOS has the following specifics:
First of all, each entity (the term used to refer to applications and their associated processes in KasperskyOS) must be statically described. A description is contained in files with the EDL, CDL and IDL extensions, which are used for building a solution. The minimum possible description of an entity is an EDL file that indicates the name of the entity. All entities developed in the first part of the Guide have a minimum static description (only an EDL file with the entity name).
Secondly, all entities to be started must be contained in the KasperskyOS image being loaded. For this reason, each example in this Guide presents not just an individual entity but a ready-to-use KasperskyOS-based solution that includes an image of the kernel that initializes the entity and auxiliary entities, such as drivers.
EDL description of the Hello entity
A static description of the Hello entity consists of a single file named Hello.edl that must indicate the entity name:
Hello.edl
/* The entity name follows the reserved word "entity". */
entity Hello
The entity name must begin with an uppercase letter. The name of an EDL file must match the name of the entity that it describes.
The second part of the Guide shows examples of more complex EDL descriptions, and also presents CDL and IDL descriptions.
Creating the Einit initializing entity
When KasperskyOS is loaded, the kernel starts an entity named Einit. The Einit entity starts all other entities included in the solution, which means that it serves as the initializing entity.
The KasperskyOS Community Edition toolkit includes the einit tool, which lets you generate the code of the initializing entity (einit.c) based on the init description. In the example provided below, the file containing the init description is named init.yaml, but it can have any name.
For more details, refer to Entity startup.
If you want the Hello entity to start after the operating system is loaded, all you need to do is specify its name in the init.yaml file and build an Einit entity from it.
init.yaml
entities:
# Start the "Hello" entity.
- name: Hello
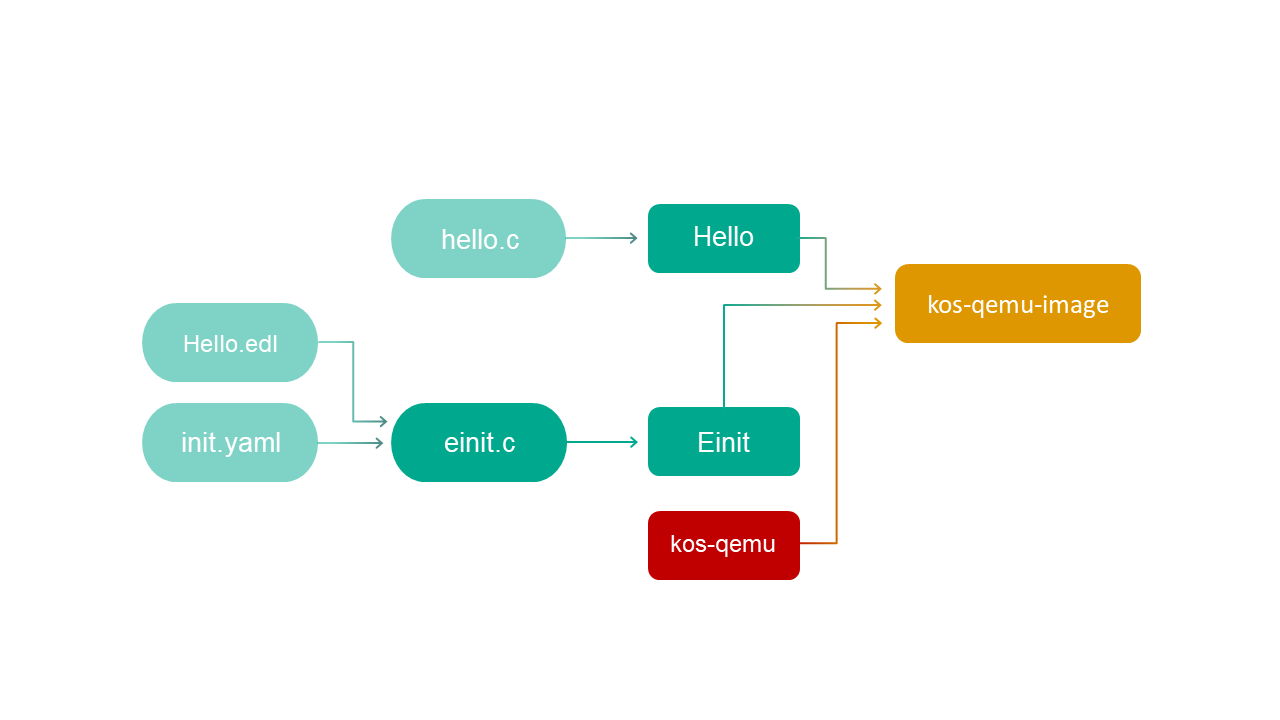
Build scheme for the hello example
The general build scheme for the hello example looks as follows:
Building and running the hello example
See the Building and running examples section.
Page topVFS: overview
The VFS component contains the implementations of file systems and the network stack. POSIX calls for working with file systems and the network are sent to the VFS component, which then calls the block device driver or network driver, respectively.

Multiple copies of the VFS component can be added to a solution to separate the data streams of different entities. Each VFS copy is built separately and can contain the entire VFS functionality or a specific part of it, for example:
- One or more file systems
- Network stack
- Network stack and network driver
The VFS component can be used either directly (through static linking) or via IPC (as a separate entity). Use of VFS functionality via IPC enables the solution developer to do the following:
- Use a solution security policy to control method calls that work with the network and file systems.
- Connect multiple client entities to one VFS entity.
- Connect one client entity to two VFS entities to separately work with the network and file systems.
Building a VFS entity
KasperskyOS Community Edition does not provide a ready-to-use image for an entity containing the VFS component. The solution developer can independently build one or more entities that each include the specific VFS functionality necessary for the solution.
Please also refer to the multi_vfs_dhcpcd, multi_vfs_dns_client and multi_vfs_ntpd examples provided in KasperskyOS Community Edition.
Building a network VFS
To build a "network" VFS entity containing a network driver, the file containing the main() function must be linked to the vfs_server, vfs_net and dnet_implementation libraries:
CMakeLists.txt (fragment)
target_link_libraries (Net1Vfs ${vfs_SERVER_LIB}
${vfs_NET_LIB}
${dnet_IMPLEMENTATION_LIB})
set_target_properties (Net1Vfs PROPERTIES ${blkdev_ENTITY}_REPLACEMENT "")
Using a "network" VFS entity linked to a network driver
To use a network driver via IPC (as a separate entity), the dnet_client library must be used instead of the dnet_implementation library:
CMakeLists.txt (fragment)
target_link_libraries (Net2Vfs ${vfs_SERVER_LIB}
${vfs_NET_LIB}
${dnet_CLIENT_LIB})
set_target_properties (Net2Vfs PROPERTIES ${blkdev_ENTITY}_REPLACEMENT "")

Using a "network" VFS entity and a network driver as a separate entity
File operations are used by some functions, including printing to stdout. For these functions to work correctly, the vfs_implementation library must be added instead of vfs_net during the build.
Building a file VFS
To build a "file" VFS entity, the file containing the main() function must be linked to the vfs_server and vfs_fs libraries and to the libraries for implementing file systems:
CMakeLists.txt (fragment)
target_link_libraries (VfsFs
${vfs_SERVER_LIB}
${LWEXT4_LIB}
${vfs_FS_LIB})
set_target_properties (VfsFs PROPERTIES ${blkdev_ENTITY}_REPLACEMENT ${ramdisk_ENTITY})
In this example, the VFS entity is prepared to connect to the ramdisk driver entity.
A block device driver cannot be linked to VFS and is always used via IPC:

Using a "file" VFS entity and a driver as a separate entity
If necessary, you can build a VFS entity containing the network stack and the file systems. To do so, use the vfs_server, vfs_implementation, and dnet_implementation libraries (or dnet_client), and the file system implementation libraries.
Env entity
The Env service entity allows running entities to pass arguments and environment variables. When started, each entity automatically sends a request to the Env entity and receives the necessary data.
By including the Env entity in the solution, you can mount file systems when VFS is started, connect one client entity to two VFS entities, and perform many other tasks.
To use the Env entity in your solution, the following is required:
1. Develop the code of the Env entity by using macros from env/env.h.
2. Build an image of the entity by linking it to the env_server library.
3. In the init description, indicate that the Env entity must be started and connected to the selected entities (Env acts a server in this case). The channel name is defined by the ENV_SERVICE_NAME macro declared in the env/env.h file.
4. Include the Env entity image in the solution image.
Env entity code
The code of the Env entity utilizes the following macros and functions declared in the env/env.h file:
ENV_REGISTER_ARGS(name,argarr)– arguments from theargarrarray will be passed to the entity namedname.ENV_REGISTER_VARS(name,envarr)– environment variables from theenvarrarray will be passed to the "name" entity.ENV_REGISTER_PROGRAM_ENVIRONMENT(name,argarr,envarr)– arguments and environment variables will be passed to the entity namedname.envServerRun()– initialize the server part of the entity so that it can respond to requests.
Example:
env.c
int main(int argc, char** argv)
{
const char* NetVfsArgs[] = {
"-l", "devfs /dev devfs 0",
"-l", "romfs /etc romfs 0"
};
ENV_REGISTER_ARGS("VFS", NetVfsArgs);
envServerRun();
return EXIT_SUCCESS;
}
Init.yaml example for use of the Env entity
In the next example, the Client entity will be connected to the Env entity whose image is located in the env folder:
init.yaml
entities:
- name: env.Env
- name: Client
connections:
- target: env.Env
id: {var: ENV_SERVICE_NAME, include: env/env.h}
Connecting a client entity to one or two VFS entities
Calls of network- and file POSIX functions can be forwarded to two separate VFS components by connecting a client entity to two different VFS entities. If such data stream separation is not required (for example, if the client only works with the network), connecting the client entity to a single VFS entity is enough.
Connecting to one VFS entity
The name of the IPC channel between the client entity and the VFS entity must be defined by the _VFS_CONNECTION_ID macro declared in the vfs/defs.h file. In this case, "network" calls and "file" calls will be sent to this VFS entity.
Example:
init.yaml
- name: ClientEntity
connections:
- target: VfsEntity
id: {var: _VFS_CONNECTION_ID, include: vfs/defs.h}
- name: VfsEntity
Connecting to two VFS entities
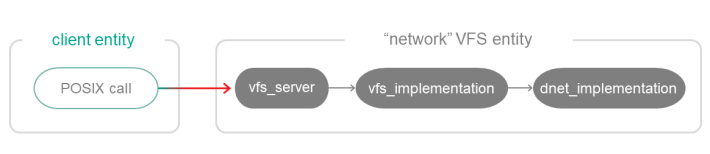
Let's examine a client entity that is connected to two different VFS entities. We will name them "network" VFS and "file" VFS.
The _VFS_NETWORK_BACKEND environment variable is used so that "network" calls from the client entity are sent only to the "network" VFS:
- For the "network" VFS entity:
_VFS_NETWORK_BACKEND=server:<name of the IPC channel to the "network" VFS> - For the client entity:
_VFS_NETWORK_BACKEND=client: <name of the IPC channel to the "network" VFS>
The analogous _VFS_FILESYSTEM_BACKEND environment variable is used to send "file" calls:
- For the "file" VFS entity:
_VFS_FILESYSTEM_BACKEND=server:<name of the IPC channel to the "file" VFS> - For the client entity:
_VFS_FILESYSTEM_BACKEND=client: <name of the IPC channel to the "file" VFS>
As a result, the functions for working with the network and files will be sent to two different VFS entities.
In the next example, the Client entity is connected to two VFS entities – the "network" VfsFirst entity and the "file" VfsSecond entity:
init.yaml
entities:
- name: Env
- name: Client
connections:
- target: Env
id: {var: ENV_SERVICE_NAME, include: env/env.h}
- target: VfsFirst
id: VFS1
- target: VfsSecond
id: VFS2
- name: VfsFirst
connections:
- target: Env
id: {var: ENV_SERVICE_NAME, include: env/env.h}
- name: VfsSecond
connections:
- target: Env
id: {var: ENV_SERVICE_NAME, include: env/env.h}
Env entity code:
env.c
int main(void)
{
const char* vfs_first_args[] = { "_VFS_NETWORK_BACKEND=server:VFS1" };
ENV_REGISTER_VARS("VfsFirst", vfs_first_args);
const char* vfs_second_args[] = { "_VFS_FILESYSTEM_BACKEND=server:VFS2" };
ENV_REGISTER_VARS("VfsSecond", vfs_second_args);
const char* client_envs[] = { "_VFS_NETWORK_BACKEND=client:VFS1", "_VFS_FILESYSTEM_BACKEND=client:VFS2" };
ENV_REGISTER_VARS("Client", client_envs);
envServerRun();
return EXIT_SUCCESS;
}
Please also refer to the multi_vfs_dhcpcd, multi_vfs_dns_client and multi_vfs_ntpd examples provided in KasperskyOS Community Edition.
Mounting file systems when VFS starts
By default, the VFS component provides access to the following:
- RAMFS file system. RAMFS is mounted to the root directory by default.
- ROMFS object storage. The storage contains non-executable files (including configuration files) that are added to the solution image during the build. The ROMFS file system is not mounted by default. However, the storage can be accessed indirectly through the
-fargument, for example.
If you need to mount other file systems, this can be done either by using the mount() call after the VFS starts or immediately when the VFS starts by passing the following arguments and environment variables to it:
-l <entry in fstab format>The
-largument lets you mount the file system.-f <path to fstab file>The
-fargument lets you pass the file containing entries in fstab format for mounting file systems. The ROMFS storage will be searched for the file. If theUMNAP_ROMFSvariable is defined, the file system mounted using theROOTFSvariable will be searched for the file.UNMAP_ROMFSIf the
UNMAP_ROMFSvariable is defined, the ROMFS storage will be deleted. This helps conserve memory and change behavior when using the-fargument.ROOTFS = <entry in fstab format>The
ROOTFSvariable lets you mount a file system to the root directory. In combination with theUNMAP_ROMFSvariable and the-fargument, it lets you search for the fstab file in the mounted file system instead of in the ROMFS storage.
Example:
env.c
int main(int argc, char** argv)
{
/* The devfs and romfs file systems will be mounted for the Vfs1 entity. */
const char* Vfs1Args[] = {
"-l", "devfs /dev devfs 0",
"-l", "romfs /etc romfs 0"
};
ENV_REGISTER_ARGS("Vfs1", Vfs1Args);
/* The file systems defined through the /etc/dhcpcd.conf file located in the ROMFS storage will be mounted for the Vfs2 entity. */
const char* Vfs2Args[] = { "-f", "/etc/dhcpcd.conf" };
ENV_REGISTER_ARGS("Vfs2", Vfs2Args);
/* The ext2 file system containing the /etc/fstab file used for mounting additional file systems will be mounted to the root directory for the Vfs3 entity. The ROMFS storage will be deleted. */
const char* Vfs3Args[] = { "-f", "/etc/fstab" };
const char* Vfs3Envs[] = {
"ROOTFS=ramdisk0,0 / ext2 0",
"UNMAP_ROMFS=1"
};
ENV_REGISTER_PROGRAM_ENVIRONMENT("Vfs3", Vfs3Args, Vfs3Envs);
envServerRun();
return EXIT_SUCCESS;
}
Please also refer to the net_with_separate_vfs, net2_with_separate_vfs, multi_vfs_dhcpcd, multi_vfs_dns_client and multi_vfs_ntpd examples provided in KasperskyOS Community Edition.
POSIX support limitations
KasperskyOS uses a limited POSIX interface oriented toward the POSIX.1-2008 standard (without XSI support). These limitations are primarily due to security precautions.
Limitations affect the following:
- Interaction between processes
- Interaction between threads via signals
- Standard input/output
- Asynchronous input/output
- Use of robust mutexes
- Terminal operations
- Shell usage
- Management of file handles
Limitations include:
- Unimplemented interfaces
- Interfaces that are implemented with deviations from the POSIX.1-2008 standard
- Stub interfaces that do not perform any operations except assign the
ENOSYSvalue to theerrnovariable and return the value-1
In KasperskyOS, signals cannot interrupt the Call(), Recv(), and Reply() system calls that support the operation of libraries that implement the POSIX interface.
The KasperskyOS kernel does not transmit signals.
Limitations on interaction between processes
Interface |
Purpose |
Implementation |
Header file based on the POSIX.1-2008 standard |
|---|---|---|---|
|
Create a new (child) process. |
Stub |
|
|
Register the handlers that are called before and after the child process is created. |
Not implemented |
|
|
Wait for the child process to stop or complete. |
Stub |
|
|
Wait for the state of the child process to change. |
Not implemented |
|
|
Wait for the child process to stop or complete. |
Stub |
|
|
Run the executable file. |
Stub |
|
|
Run the executable file. |
Stub |
|
|
Run the executable file. |
Stub |
|
|
Run the executable file. |
Stub |
|
|
Run the executable file. |
Stub |
|
|
Run the executable file. |
Stub |
|
|
Run the executable file. |
Stub |
|
|
Move the process to another group or create a group. |
Stub |
|
|
Create a session. |
Not implemented |
|
|
Get the group ID for the calling process. |
Not implemented |
|
|
Get the group ID. |
Stub |
|
|
Get the ID of the parent process. |
Not implemented |
|
|
Get the session ID. |
Stub |
|
|
Get the time values for the process and its descendants. |
Stub |
|
|
Send a signal to the process or group of processes. |
Only the |
|
|
Wait for a signal. |
Not implemented |
|
|
Check for received blocked signals. |
Not implemented |
|
|
Get and change the set of blocked signals. |
Stub |
|
|
Wait for a signal. |
Stub |
|
|
Wait for a signal from the defined set of signals. |
Stub |
|
|
Send a signal to the process. |
Not implemented |
|
|
Wait for a signal from the defined set of signals. |
Not implemented |
|
|
Wait for a signal from the defined set of signals. |
Not implemented |
|
|
Create an unnamed semaphore. |
You cannot create an unnamed semaphore for synchronization between processes. If a non-zero value is passed to the function through the |
|
|
Create/open a named semaphore. |
You cannot open a named semaphore that was created by another process. Named semaphores (like unnamed semaphores) are local, which means that they are accessible only to the process that created them. |
|
|
Define the mutex attribute that allows the mutex to be used by multiple processes. |
You cannot define the mutex attribute that allows the mutex to be used by multiple processes. If the |
|
|
Define the barrier attribute that allows the barrier to be used by multiple processes. |
You cannot define the barrier attribute that allows the barrier to be used by multiple processes. If the |
|
|
Define the conditional variable attribute that allows the conditional variable to be used by multiple processes. |
You cannot define the conditional variable attribute that allows the conditional variable to be used by multiple processes. If the |
|
|
Define the read/write lock object attribute that allows the read/write lock object attribute to be used by multiple processes. |
You cannot define the read/write lock object attribute that allows the read/write lock object attribute to be used by multiple processes. If the |
|
|
Create a spin lock. |
You cannot create a spin lock for synchronization between processes. If the |
|
|
Create or open a shared memory object. |
Not implemented |
|
|
Map to memory. |
You cannot perform memory mapping for interaction between processes. If the |
|
|
Define the memory access permissions. |
This function works as a stub by default. To use this function, define special settings for the KasperskyOS kernel. |
|
|
Create an unnamed channel. |
You cannot use an unnamed channel for data transfer between processes. Unnamed channels are local, which means that they are accessible only to the process that created them. |
|
|
Create a special FIFO file (named channel). |
Stub |
|
|
Create a special FIFO file (named channel). |
Not implemented |
|
Limitations on interaction between threads via signals
Interface |
Purpose |
Implementation |
Header file based on the POSIX.1-2008 standard |
|---|---|---|---|
|
Send a signal to an execution thread. |
You cannot send a signal to an execution thread. If a signal number is passed to the function through the |
|
|
Get and change the set of blocked signals. |
Stub |
|
|
Restore the state of the control thread and the signals mask. |
Not implemented |
|
|
Save the state of the control thread and the signals mask. |
Not implemented |
|
Standard input/output limitations
Interface |
Purpose |
Implementation |
Header file based on the POSIX.1-2008 standard |
|---|---|---|---|
|
Formatted print to file. |
Not implemented |
|
|
Use memory as a data stream. |
Not implemented |
|
|
Use dynamically allocated memory as a data stream. |
Not implemented |
|
|
Formatted print to file. |
Not implemented |
|
Asynchronous input/output limitations
Interface |
Purpose |
Implementation |
Header file based on the POSIX.1-2008 standard |
|---|---|---|---|
|
Cancel input/output requests that are waiting to be handled. |
Not implemented |
|
|
Receive an error from an asynchronous input/output operation. |
Not implemented |
|
|
Request the execution of input/output operations. |
Not implemented |
|
|
Request a file read operation. |
Not implemented |
|
|
Get the status of an asynchronous input/output operation. |
Not implemented |
|
|
Wait for the completion of asynchronous input/output operations. |
Not implemented |
|
|
Request a file write operation. |
Not implemented |
|
|
Request execution of a set of input/output operations. |
Not implemented |
|
Limitations on the use of robust mutexes
Interface |
Purpose |
Implementation |
Header file based on the POSIX.1-2008 standard |
|---|---|---|---|
|
Return a robust mutex to a consistent state. |
Not implemented |
|
|
Get a robust mutex attribute. |
Not implemented |
|
|
Define a robust mutex attribute. |
Not implemented |
|
Terminal operation limitations
Interface |
Purpose |
Implementation |
Header file based on the POSIX.1-2008 standard |
|---|---|---|---|
|
Get the path to the file of the control terminal. |
This function only returns or passes an empty string through the |
|
|
Define the terminal settings. |
The input speed, output speed, and other settings specific to hardware terminals are ignored. |
|
|
Wait for output completion. |
This function only returns the value |
|
|
Suspend or resume receipt or transmission of data. |
Suspending output and resuming suspended output are not supported. |
|
|
Clear the input queue or output queue, or both of these queues. |
This function only returns the value |
|
|
Break the connection with the terminal for a set time. |
This function only returns the value |
|
|
Get the path to the terminal file. |
This function only returns a null pointer. |
|
|
Get the path to the terminal file. |
This function only returns an error value. |
|
|
Get the ID of a group of processes using the terminal. |
This function only returns the value |
|
|
Define the ID for a group of processes using the terminal. |
This function only returns the value |
|
|
Get the ID of a group of processes for the leader of the session connected to the terminal. |
This function only returns the value |
|
Shell operation limitations
Interface |
Purpose |
Implementation |
Header file based on the POSIX.1-2008 standard |
|---|---|---|---|
|
Create a child process for command execution and a channel for this process. |
This function only assigns the |
|
|
Close the channel with the child process created by the |
This function cannot be used because its input parameter is the data stream handle returned by the |
|
|
Create a child process for command execution. |
Stub |
|
|
Perform a shell-like expansion of the string. |
Not implemented |
|
|
Free up the memory allocated for the results of calling the |
Not implemented |
|
Limitations on management of file handles
Interface |
Purpose |
Implementation |
Header file based on the POSIX.1-2008 standard |
|---|---|---|---|
|
Make a copy of the handle of an opened file. |
Handles of regular files, standard I/O streams, sockets and channels are supported. There is no guarantee that the lowest available handle will be received. |
|
|
Make a copy of the handle of an opened file. |
Handles of regular files, standard I/O streams, sockets and channels are supported. The handle of an opened file needs to be passed through the |
|