Содержание
Начало работы
Этот раздел содержит информацию, необходимую для начала работы с KasperskyOS Community Edition.
Использование Docker-контейнера
Для установки и использования KasperskyOS Community Edition можно использовать Docker-контейнер, в котором развернут образ одной из поддерживаемых операционных систем.
Чтобы использовать Docker-контейнер для установки KasperskyOS Community Edition:
- Убедитесь что программное обеспечение Docker установлено и запущено.
- Для загрузки официального Docker-образа операционной системы Ubuntu GNU/Linux 22.04 "Jammy Jellyfish" из публичного репозитория Docker Hub выполните следующую команду:
docker pull ubuntu:22.04 - Для запуска образа выполните следующую команду:
docker run --net=host --user root --privileged -it --rm ubuntu:22.04 bash - Скопируйте deb-пакет для установки KasperskyOS Community Edition в контейнер.
- Установите KasperskyOS Community Edition.
- Для корректной работы некоторых примеров необходимо добавить внутри контейнера директорию
/usr/sbinв переменную окруженияPATH, выполнив следующую команду:export PATH=/usr/sbin:$PATH
Установка и удаление
Установка
KasperskyOS Community Edition поставляется в виде deb-пакета. Для установки KasperskyOS Community Edition мы рекомендуем использовать установщик пакетов apt.
Для развертывания пакета с помощью apt запустите команду:
Пакет будет установлен в директорию /opt/KasperskyOS-Community-Edition-<version>.
Чтобы удобно работать с инструментами, поставляемыми в составе KasperskyOS Community Edition SDK, нужно добавить в переменную окружения PATH путь к исполняемым файлам этих инструментов /opt/KasperskyOS-Community-Edition-<version>/toolchain/bin. Чтобы не делать это каждый раз при входе в пользовательскую сессию, нужно выполнить скрипт /opt/KasperskyOS-Community-Edition-<version>/set_env.sh, выйти и снова войти в сессию.
Синтаксис команды вызова скрипта set_env.sh:
Параметры:
-dОтменяет действие скрипта.
-h,--helpОтображает текст справки.
Помимо изменения переменной окружения PATH скрипт задает переменные окружения KOSCEVER и KOSCEDIR, которые содержат версию и абсолютный путь к KasperskyOS Community Edition SDK соответственно. Использование этих переменных окружения позволяет системе сборки при запуске определить путь установки SDK, а также проверить, что версия решения соответствует версии SDK.
Удаление
Перед удалением KasperskyOS Community Edition отмените действие скрипта set_env.sh, если выполняли этот скрипт после установки SDK.
Для удаления KasperskyOS Community Edition выполните команду:
В результате выполнения этой команды будут удалены все установленные файлы в директории /opt/KasperskyOS-Community-Edition-<version>.
Настройка среды разработки
В этом разделе содержится краткое руководство по настройке среды разработки и добавлению заголовочных файлов, поставляемых в KasperskyOS Community Edition, в проект разработки.
Настройка редактора кода
Для упрощения процесса разработки решений на базе KasperskyOS перед началом работы рекомендуется:
- Установить в редакторе кода расширения и плагины для используемых языков программирования (C и/или C++).
- Добавить заголовочные файлы, поставляемые в KasperskyOS Community Edition, в проект разработки.
Заголовочные файлы расположены в следующей директории:
/opt/KasperskyOS-Community-Edition-<version>/sysroot-aarch64-kos/include.
Пример настройки Visual Studio Code
Например, работа с исходным кодом при разработке под KasperskyOS может проводиться в Visual Studio Code.
Для более удобной навигации по коду проекта, включая системный API, необходимо выполнить следующие действия:
- Создайте новую рабочую область (workspace) или откройте существующую рабочую область в Visual Studio Code.
Рабочая область может быть открыта неявно, с помощью пунктов меню
File>Open folder. - Убедитесь, что расширение C/C++ for Visual Studio Code установлено.
- В меню
Viewвыберите пунктCommand Palette. - Выберите пункт
C/C++: Edit Configurations (UI). - В поле
Include pathдобавьте путь/opt/KasperskyOS-Community-Edition-<version>/sysroot-aarch64-kos/include. - Закройте окно
C/C++ Configurations.
Сборка примеров
Сборка примеров осуществляется с помощью системы сборки CMake, входящей в состав KasperskyOS Community Edition.
Код примеров и скрипты для сборки находятся по следующему пути:
/opt/KasperskyOS-Community-Edition-<version>/examples
Сборку примеров нужно выполнять в директории, к которой у вас есть доступ на запись, например, в домашней.
Сборка примеров для запуска на QEMU
Чтобы выполнить сборку примера, перейдите в директорию с примером и выполните команду:
В результате работы скрипта cross-build.sh создается образ решения на базе KasperskyOS, который включает пример, и инициируется запуск примера на QEMU. Файл образа решения kos-qemu-image сохраняется в директории <название примера>/build/einit.
Сборка примеров для запуска на Raspberry Pi 4 B
Чтобы выполнить сборку примера, перейдите в директорию с примером и выполните команду:
Какой образ создается в результате работы скрипта cross-build.sh зависит от выбора значения параметра target:
kos-imageСоздается образ решения на базе KasperskyOS, который включает в себя пример. Файл образа решения
kos-imageсохраняется в директории<название примера>/build/einit.sd-imageСоздается образ файловой системы загрузочной SD-карты. В образ файловой системы загружаются: образ
kos-image, загрузчик U-Boot, который запускает пример, и встроенное программное обеспечение (англ. firmware) для Raspberry Pi 4 B. Исходный код загрузчика U-Boot и встроенное программное обеспечение загружаются с сайта https://github.com. Файл образа файловой системыrpi4kos.imgсохраняется в директории<название примера>/build.
Запуск примеров на QEMU
Запуск примеров на QEMU в Linux с графической оболочкой
Запуск примера на QEMU в Linux с графической оболочкой осуществляется скриптом cross-build.sh, который также выполняет сборку примера. Чтобы запустить скрипт, перейдите в директорию с примером и выполните команду:
Запуск примеров на QEMU в Linux без графической оболочки
Чтобы запустить пример на QEMU в Linux без графической оболочки, перейдите в директорию с примером, соберите пример и выполните следующие команды:
Подготовка Raspberry Pi 4 B к запуску примеров
Коммутация компьютера и Raspberry Pi 4 B
Чтобы видеть вывод с Raspberry Pi 4 B на компьютере, выполните следующие действия:
- Соедините пины преобразователя USB-UART на базе FT232 с соответствующими GPIO-пинами Raspberry Pi 4 B (см. рис. ниже).
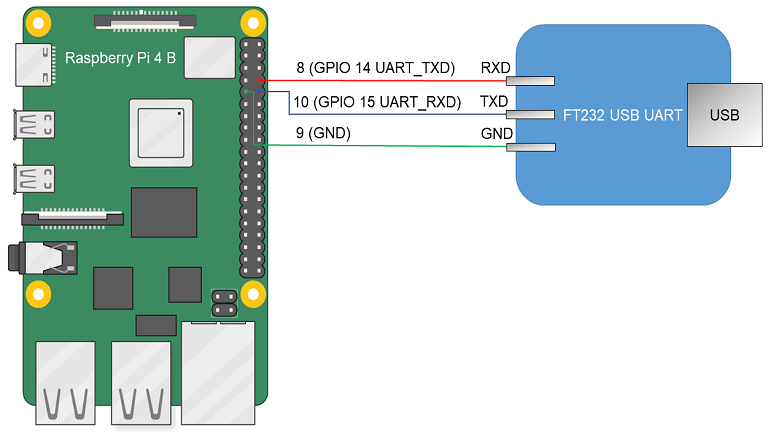
Схема соединения преобразователя USB-UART и Raspberry Pi 4 B
- Соедините USB-порт компьютера и преобразователь USB-UART.
- Установите PuTTY или другую аналогичную программу. Настройте параметры следующим образом:
bps = 115200,data bits = 8,stop bits = 1,parity = none,flow control = none. Задайте порт USB, через который подключен преобразователь USB-UART, используемый для получения вывода с Raspberry Pi 4 B.
Чтобы компьютер и Raspberry Pi 4 B могли взаимодействовать через сеть Ethernet, выполните следующие действия:
- Соедините сетевые карты компьютера и Raspberry Pi 4 B с коммутатором или друг с другом.
- Выполните настройку сетевой карты компьютера, чтобы ее IP-адрес был в одной подсети с IP-адресом сетевой карты Raspberry Pi 4 B (параметры сетевой карты Raspberry Pi 4 B задаются в файле
dhcpcd.conf, который находится по пути<название примера>/resources/...).
Подготовка загрузочной SD-карты для Raspberry Pi 4 B
Если при сборке примера был создан образ rpi4kos.img, то достаточно записать получившийся образ на SD-карту. Для этого подключите SD-карту к компьютеру и выполните следующую команду:
Если при сборке примера был создан образ kos-image, то перед записью образа на SD-карту, её нужно дополнительно подготовить. Загрузочную SD-карту для Raspberry Pi 4 B можно подготовить автоматически и вручную.
Чтобы подготовить загрузочную SD-карту автоматически, подключите SD-карту к компьютеру и выполните следующие команды:
Чтобы подготовить загрузочную SD-карту вручную, выполните следующие действия:
- Выполните сборку загрузчика U-Boot для платформы ARMv8, который будет автоматически запускать пример. Для этого выполните следующие команды:$ sudo apt install git build-essential libssl-dev bison flex unzip parted gcc-aarch64-linux-gnu pv -y $ git clone --depth 1 --branch v2022.01 https://github.com/u-boot/u-boot.git u-boot-armv8 $ cd u-boot-armv8 $ make ARCH=arm CROSS_COMPILE=aarch64-linux-gnu- rpi_4_defconfig $ echo 'CONFIG_SERIAL_PROBE_ALL=y' > ./.custom_config $ echo 'CONFIG_BOOTCOMMAND="fatload mmc 0 ${loadaddr} kos-image; bootelf ${loadaddr} ${fdt_addr}"' >> ./.custom_config $ echo 'CONFIG_PREBOOT="pci enum;"' >> ./.custom_config $ ./scripts/kconfig/merge_config.sh '.config' '.custom_config' $ make ARCH=arm CROSS_COMPILE=aarch64-linux-gnu- u-boot.bin
- Подготовьте образ с файловой системой для SD-карты.# Образ будет содержать boot-раздел на 1 ГБ в fat32 и три раздела по 350 МБ в ext2, ext3 и ext4 соответственно. $ fs_image_name=sdcard.img $ dd if=/dev/zero of=${fs_image_name} bs=1024k count=2048 $ sudo parted ${fs_image_name} mklabel msdos $ loop_device=$(sudo losetup --find --show --partscan ${fs_image_name}) $ sudo parted ${loop_device} mkpart primary fat32 8192s 50% $ sudo parted ${loop_device} mkpart extended 50% 100% $ sudo parted ${loop_device} mkpart logical ext2 50% 67% $ sudo parted ${loop_device} mkpart logical ext3 67% 84% $ sudo parted ${loop_device} mkpart logical ext4 84% 100% $ sudo parted ${loop_device} set 1 boot on $ sudo mkfs.vfat ${loop_device}p1 $ sudo mkfs.ext2 ${loop_device}p5 $ sudo mkfs.ext3 ${loop_device}p6 $ sudo mkfs.ext4 -O ^64bit,^extent ${loop_device}p7
- Скопируйте загрузчик U-Boot и встроенное программное обеспечение (англ. firmware) для Raspberry Pi 4 B на полученный образ файловой системы, выполнив следующие команды:# В следующих командах путь ~/mnt/fat32 используется для примера. # Вы можете использовать другой путь. $ mount_temp_dir=~/mnt/fat32 $ mkdir -p ${mount_temp_dir} $ sudo mount ${loop_device}p1 ${mount_temp_dir} $ git clone --depth 1 --branch 1.20220331 https://github.com/raspberrypi/firmware.git firmware $ sudo cp u-boot.bin ${mount_temp_dir}/u-boot.bin $ sudo cp -r firmware/boot/. ${mount_temp_dir}
- Заполните конфигурационный файл для загрузчика U-Boot в образе используя следующие команды:$ sudo sh -c "echo '[all]' > ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'arm_64bit=1' >> ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'enable_uart=1' >> ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'kernel=u-boot.bin' >> ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'dtparam=i2c_arm=on' >> ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'dtparam=i2c=on' >> ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'dtparam=spi=on' >> ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'device_tree_address=0x2eff5b00' >> ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'device_tree_end=0x2f0f5b00' >> ${mount_temp_dir}/config.txt" $ sudo sh -c "echo 'dtoverlay=uart5' >> ${mount_temp_dir}/config.txt" $ sudo umount ${mount_temp_dir} $ sudo losetup -d ${loop_device}
- Запишите получившийся образ на SD-карту. Для этого подключите SD-карту к компьютеру и выполните следующую команду:# В следующей команде [X] – последний символ в имени блочного устройства для SD-карты. $ sudo pv -L 32M ${fs_image_name} | sudo dd bs=64k of=/dev/sd[X] conv=fsync
Запуск примеров на Raspberry Pi 4 B
Чтобы запустить пример на Raspberry Pi 4 B, выполните следующие действия:
- Перейдите в директорию с примером и соберите пример.
- Убедитесь, что Raspberry Pi 4 B и загрузочная SD-карта подготовлены к запуску примеров.
- Подключите загрузочную SD-карту к Raspberry Pi 4 B.
- Подайте питание на Raspberry Pi 4 B и дождитесь, пока запустится пример.
О том, что пример запустился, свидетельствует вывод, отображаемый на компьютере, к которому подключен Raspberry Pi 4 B.